Software LoRa APRS od CD2RXU je fork od OE5BPA, ke které přidal nové funkce. Přináší několik vylepšení oproti původnímu softwaru.
- výběr různých volacích značek ( a ikon, např. Auto TK5EP-9, běžec TK5EP-7 atd. )
- snížená spotřeba energie snížením rychlosti CPU
- komprese přenášených dat za účelem zkrácení doby přenosu, čímž se sníží spotřeba energie a zlepší se imunita příjmu
- žádost o místní zprávu o počasí atd...
Chcete-li využít určitých funkcí, musíte také použít jeho software iGate.
Jako hardware použijeme Lora modul (LILYGO® TTGO T-Beam V1.1 LoRa ESP32)
Je vybaven procesorem ESP32, GPS NEO-6M, 0,96 "OLED displejem, Lora transceiverem, WiFi a Bluetooth.
- Připojte modul ESP32 k počítači přes port USB.
Správce zařízení by měl rozpoznat použitý port COM. Pokud tomu tak není, pravděpodobně budete muset nainstalovat správný ovladač USB v závislosti na použitých modulech a obvodu rozhraní. Použijeme ovladač CH9102. - Tracker a iGate jsou navrženy pro instalaci pomocí Kód vizuálního studia ( VSC ) editor a rozšíření PlatformIO. Proto musíte mít tyto programy nainstalovány předem.
- Software Tracker je k dispozici zde :
https://github.com/richonguzman/LoRa_APRS_Tracker Software iGate je k dispozici zde :
https://github.com/richonguzman/LoRa_APRS_iGate - Konfigurační soubor najdeme zde : /data/tracker_config.json
Část týkající se volací značky je v tabulce „Beacons“.
Každý objekt má klávesu „callsign“ s několika dalšími klávesami, které jsou souvisejícími parametry.
Tyto parametry se používají k přizpůsobení přenosu majáku podle typu majáku ( auto, chodec, kolo ).
Klíč „symbol“ je přizpůsoben typu majáku ( „[“ = běžec, „>“ = auto, „b“ = kolo ). Část inteligentního majáku upravuje dobu přenosu majáku na rychlost sledovače.
Čím rychleji vozidlo jede, často maják vysílá.První objekt volací značky musí být výchozí objekt, který bude načten při spuštění. (dokud autor nepřidá možnost zapamatovat si výběr volací značky)beacons callsign NOCALL-10 Callsign with SSID symbol > Beacons symbol, see table overlay / Overlay for icons, in connection with "symbol". comment Comment to be sent, keep it as short as necessary as it lenghtens the beacon smart_beacon active true Smart beacon, allows an intelligent beacon transmission in relation with tracker movement slowrate 120 in s, slow rate period slowSpeed 10 in km/h slow speed limit fastRate 60 in s, fast rate period fastSpeed 70 in km/h fast speed limit minTXdist 100 minDeltaBeacon 12 turnMinDeg 10 in degrees, direction change limit turnSlope 80 
Další parametry se vztahují k nastavení LoRa protokolu a obecným parametrům trackeru.
![]()
| Lora | frequency | 433775000 | Frequency in kHz |
| spreadingFactor | 12 | Spreading factor | |
| signalBandwidth | 125000 | LoRa bandwidth | |
| codingRate4 | 5 | Number of bits transmitted for error correction | |
| power | 20 | Power in dBm. 20 dBm = 100 mW | |
| other | showSymbolOnScreen | true | True=active. Show tracker symbol on OLED display. |
| sentCommentAfterXBeacons | 30 | Send the comment after 30 beacon transmissions | |
| displayEcoMode | false | Screensaver activation (saves battery) | |
| displayTimeout | 4 | Delay before screen shutdown (saver) | |
| path | WIDE1-1 | Number of hops a beacon can make | |
| noneSmartBeaconrate | 15 | Time for fixed time beacon when no SmartBeacon is active | |
| rememberStationTime | 30 | In min, time for remembering a station/tracker in the listening part | |
| maxDistanceToTracker | 30 | Not implemented | |
| standingUpdateTime | 15 | In min, interval of beacon transmit when no tracket movement | |
| sendAltitude | true | Send the altitude value | |
| sendBatteryInfo | false | Send battery voltage in beacon comment | |
| bluetooh | true | activiates bluetooth to work via KISS or TNC mode to connect an external software like APRSDroid | |
| disableGPS | false | disables the TTGO internal GPS in case of use of an external software | |
| ptt_trigger | activate | false | true = active to switch an external PA |
| io_pin | 4 | TTGO pin for PTT | |
| preDelay | 0 | delay in ms before PTT | |
| postDelay | 0 | delay in ms after PTT | |
| reverse | false | PTT inverted or not |
Jakmile jsou parametry upraveny podle potřeby, zkompilujte software.
- Vyberte prostředí podle modelu modulu TTGO pomocí [ 1 ].
- Vyberte port COM pro přenos do TTGO [ 2 ]
- Začněte s kompilací a přenosem [ 3 ].

Tento proces může chvilku trevat, protože se stahují chybějící knihovny.
Pokud vše půjde dobře, zpráva [ 4 ] v okně terminálu by se měl zobrazit SUCCESS.
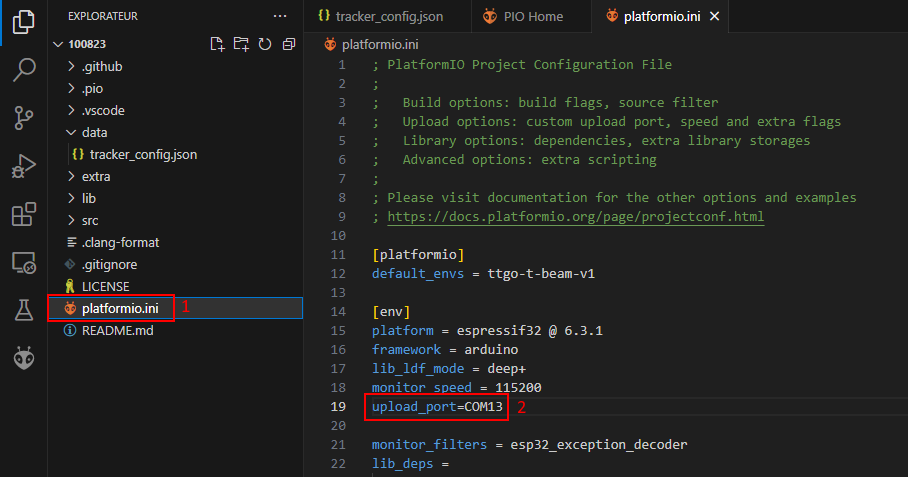
Může se stát, že editor VSC správně nezjistí sériový port, ke kterému je modul připojen.
V tomto případě musíte do konfiguračního souboru platformio.ini přidat parametr a restartovat kompilaci.
Zbývá pouze přenos obrazu souborového systému, který obsahuje parametry.
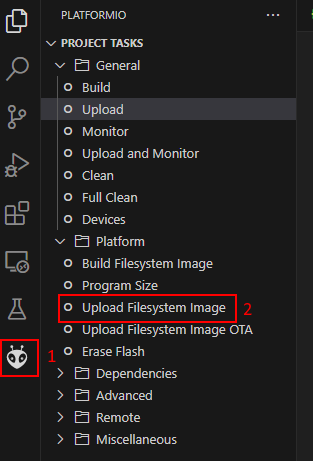
Pokud tato operace není provedena, obrazovka trackeru zůstává zamrzlá.
Možné problémy :
1. Žádná komunikace s modulem: Změňte kabel USB a zkontrolujte, zda je port USB správně detekován ( viz výše ).
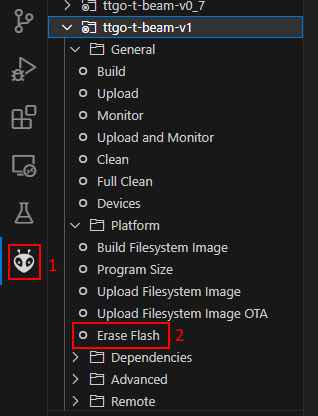
2. Navzdory úspěšnému přenosu zůstává obrazovka při spuštění modulu černá: zkontrolujte zapojení obrazovky OLed, resetujte paměť Flash a znovu načtěte software a souborový systém.
3. Při prvním použití může Tracker GPS trvat velmi dlouho, než se provede první oprava GPS ( až 20 minut ). Pokud není možné opravit, může to být způsobeno problémem s dříve nainstalovaným softwarem, který blokuje dialog s modulem GPS. V takovém případě budete muset resetovat GPS podle pokynů LilyGo:
https://github.com/Xinyuan-LilyGO/LilyGo-LoRa-Series/tree/master/firmware/NMEA_Reset
Zdá se, že nejnovější verze softwaru detekují tento nedostatek dialogu a zobrazují chybovou zprávu, která vás žádá o provedení resetu.
Použití :
Při spuštění software čeká, až GPS provede opravu GPS.
Pokud červená LED v pravé dolní části modulu bliká, byly přijaty alespoň 3 satelity a byl detekován čas. Aby modul mohl odeslat 1. maják, musí být přijaty alespoň 4 satelity.
Pokud k tomuto prvnímu GPS bodu nedojde, může to být způsobeno anténním problémem, nedostatkem vůle nebo dialogovým zámkem s modulem GPS.
Začněte přesunem na jasné místo oblohy a počkejte až 20 minut. Poté, pokud ještě není oprava, budete muset zkontrolovat anténu a případně provést reset, jak je popsáno v mém článku o sledovači OE5BPA.
Nabídka :
Centrální tlačítko se používá k navigaci mezi několika nabídkami:
Nabídka 0
- 1 krátký stisk: vynutit přenos majáku APRS
- 1 dlouhý stisk: vyberte volací značku ( podle programu v konfiguračním souboru )
- 2 krátké stisk: přejděte do nabídky 1
Nabídka 1
- 1 krátký stisk: zobrazí paměť přijatých zpráv
- 1 dlouhý stisk: vymaže paměť přijatých zpráv
- 2 krátké stisk: přejděte do nabídky 2
Menu 2
- 1 krátký stisk: odešlete žádost o údaje o počasí https://openweathermap.org/
- 1 dlouhý stisk: sledovače dostaly vzdálenosti + azimuty
- 2 krátké stisk: přejděte do nabídky 3
Nabídka 3
- 1 krátký stisk: zatím nic
- 1 dlouhý stisk: změňte EcoMode
- 2 krátké stisk: návrat do režimu sledování
Frekvence, při které je maják odeslán, závisí na rychlosti, jakou se modul pohybuje. Nad určitou prahovou hodnotou se frekvence zvyšuje.
Tyto parametry lze upravit v části „smartbeacon“ v konfiguračního souboru.
Pomocí nabídky můžete vybrat jiný volací znak a upravit parametry smartbeacon. Například pro auto chodec s různými SSID nebo jiný volací znak.
Hlavní obrazovka :
![]()
Řádek 1: Použitý znak a symbol volání
Řádek 2: Datum a čas z přijímače GPS
Řádek 3: Alternativně geografické souřadnice a lokátor QRA + počet přijatých satelitů
Řádek 4: Nadmořská výška, rychlost a směr.
Linka 5: Poslední přijatá stanice APRS
Řádek 6: Stav nabití baterie
Blueetooth :
Sledovač lze použít ve spojení se softwarem APRSDroid ( Android pouze ) přes Bluetooth a protokol KISS.
Poté funguje jako TNC, připojuje APRSDroid k síti APRS a nahrazuje připojení 3G.
Přenáší polohu GPS PDA přes modem LoRa trackeru do sítě APRS-IS.
V opačném směru tracker odešle majáky přijaté v LoRa do APRSDroid, který je zobrazí na jeho mapě.
Software musí být kompilován s parametrem „Bluetooth: true“".
Pokud nechcete, aby sledovač odeslal svou vlastní pozici, zatímco se používá APRSDroid, nastavte parametr „dispableGPS: true“.
Poté spárujte tracker s PDA přes Bluetooth.
Poté v předvolbách APRSDroid upravte následující parametry:
- Předvolby připojení / protokol připojení ": TNC ( prostý text TNC2 )
- Předvolby připojení / typ připojení ": Bluetooth SPP
- „Předvolby připojení / modul TNC bluetooth“: vyberte název sledovače „LoRa Tracker xxxx“ ze seznamu spárovaných zařízení.
- Nastavení polohy / zdroj umístění ": vyberte požadovaný režim. Smartbeaconing je nejvhodnější pro APRS. Ruční testování bez příjmu GPS.
Začněte lokalizovat na APRSDroid.
Pokud je navázáno připojení, měl by tracker zobrazit ikonu Bluetooth střídavě s ikonou APRS v pravém horním rohu displeje OLED trackeru.
![]()